
|
|
『サイバートランスポーテーション』
【電気自動車】【小型自動車】【自動運転システム】【交通情報システム】
■ 研究者
■ 研究内容の概要: 自動車会社が抱えている環境・エネルギー・事故・渋滞のそれぞれの問題を解決し,かつ車の機能を拡大するには自動車を電動化し,インテリジェント化,小型化することが唯一の手段である。本研究では,電気動力化,インテリジェント化,小型化,そして情報通信技術との融合をテーマとした研究を行っている。具体的には,高性能電気自動車のKAZの開発と評価,自動運転システムの開発,超小型多目的電気自動車の開発などをおこなってきた。 ■ 研究内容の詳細: 自動車会社が抱えている環境・エネルギー・事故・渋滞のそれぞれの問題を解決し,かつ車の機能を拡大するには自動車を電動化し,インテリジェント化,小型化することが唯一の手段である。本研究では,電気動力化,インテリジェント化,小型化,そして情報通信技術との融合をテーマとした基礎研究を行っている。以下では,本研究において取り組んできた,高性能電気自動車KAZの開発と評価,自動運転システム,超小型多目的電気自動車の開発に関して述べる。 高性能電気自動車KAZの開発と評価 高性能8輪電気自動車KAZ(Keio Advanced Zero-emission vehicle)は,「電気自動車が普及するとしたら,性能と機能の面でこれまでの車を凌ぐ物でなくてはならない。もちろん,環境に優しくなくてはいけない」という基本コンセプトに基づいて開発された超高性能電気自動車である。KAZには,要素技術として,リチウムイオン電池,ネオジウム−鉄希土類磁石(モーター),インテリジェントパワーモジュール(スピードコントローラー用のパワースイッチング素子)を採用した。さらに,効率と機能を上げる技術として,車輪の中にモーターを組み込むインホイールドライブ,床下の15cmの厚みのフレームの中に電池等,インバータ等の主要部品を挿入するコンポーネントビルトイン式フレーム,大径の車輪を小径の2つの車輪で置き換えそれぞれのショックアブソーバーをオイルパイプで結び,8輪車8輪駆動を実現したタンデムサスペンションの3つの技術を創案し,適用した。 リチウムイオン電池による,高出力化,高エネルギー密度化に加え,8輪駆動による最大出力の増加により,KAZは,最高速度311km/h、0-400m加速時間15.3秒を記録した。コンポーネントビルトイン式フレーム,タンデムサスペンションにより,車体上部のほとんどは利用者の有効利用可能空間とすることができた。さらに乗り心地の良さ、旋回時の安定性に関して,従来の高級車に属する車に比べてもさらに良好な性能を得ている。 高性能電気自動車KAZの開発と評価 自動車交通のインテリジェント化を目指して,国内外において,ITSの名のもとで様々な研究が推進されている。自動運転の側面においては,運転支援システムが実用化され,高速道路上での車間距離維持や車線逸脱防止等が実現されている。自動車の自動運転化の流れは,コントロールレベルを低く抑え,広い範囲で機能するものを積み重ねていくことによって,関連法規や制度,社会的コンセンサスを醸成していく流れとなっている。この流れは,自動運転化への着実かつ有効な道のりであると考える。また同時に,限定された空間で機能するコントロールレベルの高い完全自動運転システムを早期に運用し,信頼性,ヒューマンファクター,運用法に関する知見を蓄積すれば,その知見は,自動車の自動運転化への指標を与えることが可能となる。 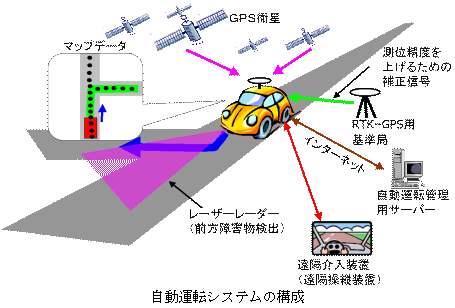
私たちは,限定された空間(キャンパス内)で運用評価できる完全自動運転システムを構築し,実際に運用することを目指している。ここでいう完全自動運転は,目的地を入力すれば,発進,走行,駐車までの全てのプロセスを自動で行うことである。 以下では,自動運転に関する研究として,発進・走行・駐車を行う完全自動運転,インターネット等の情報通信技術の応用,自動運転評価時の遠隔介入について説明する。 (1)発進・走行・駐車を行う完全自動運転 現時点において,構築してきた自動運転システムは,RTK-GPSを利用して獲得した車両位置情報と車両運動情報を利用して,車両の絶対位置を高精度かつリアルタイムに推定し,あらかじめ車内に蓄積された軌道情報との関係からハンドル,スロットル,ブレーキを制御し,自動運転を行うことができる。ドライバが,キャンパス内の目的地を入力すると,自動的に目的地に至る軌道を自動生成し,ギアを自動で変更し,発進,走行し目的地へ至る。また,レーザーレーダにより前方の障害物を検知する。目的地が駐車場の場合は,自動的にギアをバックに入れ,自動駐車を行う。 (2)インターネット等の情報通信技術の応用 将来ますます普及する情報通信技術を自動運転システムに応用についても検討している。構築した車両内のコンピュータは,無線LANにより,インターネットへの接続も行っている。現時においては,インターネットを使ったアプリケーションとして,携帯電話を使った車両呼び出しを行うことが可能である。車外の人間が,携帯電話で自分の待機している場所に関する情報を電子メール本文に記述し所定の宛先に送信する。このメールを地上局が受信,処理し,車両に目的地情報と発進指令を無線LAN経由で送信する。車両は地上局からの情報,指令に基づき,発進,走行し,携帯電話でメールを送った人間が待機している地点に至る。 (3)自動運転評価時の遠隔介入 自動運転評価のための遠隔介入装置の構築も行っている。自動運転システム利用時のドライバ挙動評価を行う際,オペレータが車内に存在する場合,しない場合では,ドライバの安心感,緊張感,挙動が大きく異なる可能性がある。本研究では,オペレータを車内に乗せないで自動運転システムをドライバが一人で利用した場合の挙動評価を行うことを目指している。もちろん,現時においても,ドライバ一人での利用時の評価は可能であるが,信頼性が不十分,危険時の評価が困難等の問題がある。そこで,遠隔地から,自動運転状態をモニタリングおよび自動運転に介入する装置(図2)を構築している。このの装置は,4つのカメラ,無線を利用して,車両前方の情報をモニターし,操舵,スロットル,ブレーキ,ギアシフトを遠隔地から操作することを可能とする。これにより,自動運転時に意図的に危険な状態を作り出したり,走行中の予期しない不具合に対処することができる。また,インターネットを利用した遠隔操縦等のアプリケーションの検討にも利用できると考えている。 超小型多目的電気自動車の開発 KAZのような最高の性能を狙う研究と同時並行して電動で走る車を小型化する研究も行ってきた。本研究では,1m×2mの超小型電気自動車を開発した。この電気自動車は,小型,電動に「多目的」という要素を加え具現化したものである。車輪は小径のものを8個利用することによって,床から上の突起物が全くない構造とすることを可能とし,同時に大きな荷重を支えることが可能している。床から上の部分は,利用者が目的に応じて,自由に構造物を組み付けることができる。すなわち,構造的な多目的性を持つものとしている。また,操舵,加速,ブレーキを電気信号で行うことを可能としている。操舵,加速,ブレーキ制御のための入力信号としては,シリアル通信,アナログ入力,パルス入力の3種類の入力を可能としており,ユーザーが目的に応じて,様々な操縦装置や,制御装置を利用してこの車両を動作させることが可能である。たとえば,ハンドル,ペダルを車内につければ,自らが運転する車両として利用可能であるし,コンピュータやセンサーを付加すれば,自動運転車や,無人搬送車両として利用することもできる。また,無線操縦も可能である。すなわちこの車両は,制御・操縦方法に関する多目的性も有している。 
■ プロジェクト3(次世代サイバーノレッジの研究)における本研究の位置付け: 情報通信技術,データベース技術等を自動車交通へ応用することを試みている。自動車一台一台がネットワークの端末として機能するだけでなく,情報を自動車の制御レベルで活用することを目指している。 ■ 研究の発展方向 現在までに蓄積した,電気動力化,インテリジェント化,小型化を融合することにより,次世代の自動車のあるべき姿を具現化したプロトタイプの開発を行いたいと考えている。 ■ 関連URL http://www.kaz-style.com ■ 関連資料 HRC_2003.PPT(zip1.1M) 電気自動車KAZ.ppt(zip7.4M) |